
Alexander Shchapov


I’ve spent last two days in Verkhovyna tuning PI parameters, learning how to flight (well, to perform controlled flight).
Since I’m completely new flyer it is a bit difficult for me to judge flying characteristics of newly build quad. According to readings I did it performs pretty good even at default PI values. I observe no oscillations, however it is difficult to land and hold altitude, which could mean that PI gains and limits still require adjustments. I think, I’ll post whole investigation results as soon as I got some meaningful result out of tuning. For now I’m posting here a little test flights captured on video. In video I’m testing stick responsiveness, that is why copter trembles, decends and ascends randomly :-) after series of flights I got more or less stable result, however Julia was tired of filming at that point, so here couple of videos we’ve recorded:
Also, I’ve made several upgrades to copter itself. I got power distribution board, which replaced hand-made one: 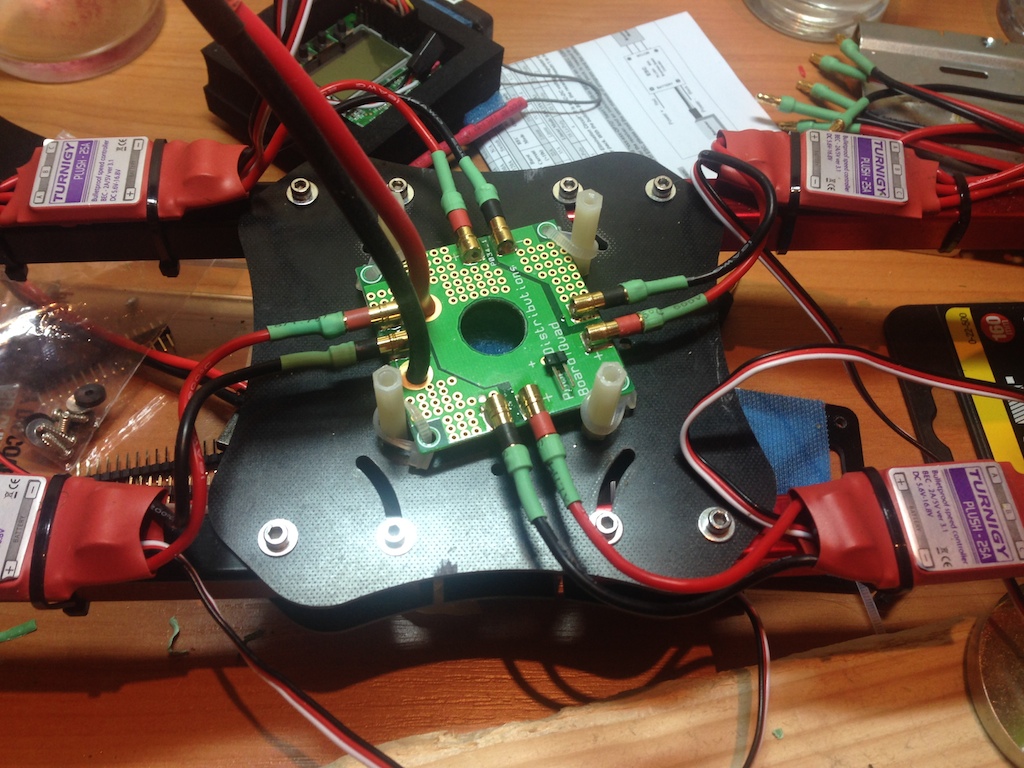 This also made possible to shorten ESC power plugs which resulted whole setup to become neat.
This also made possible to shorten ESC power plugs which resulted whole setup to become neat.
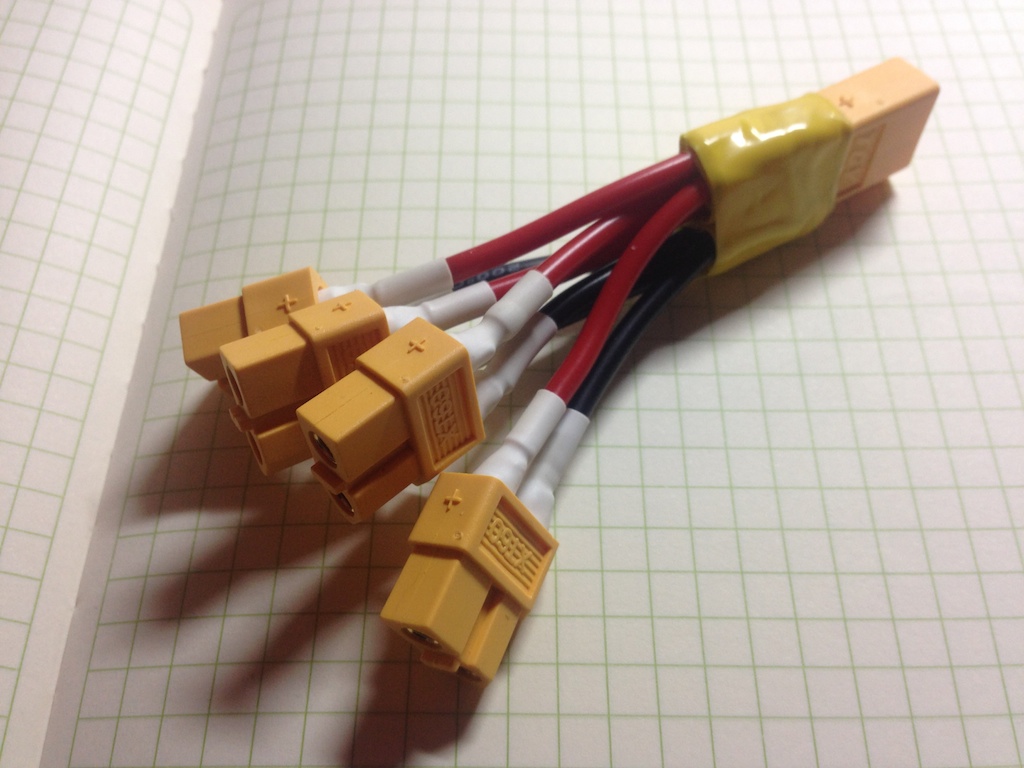
Also IMAX charger 4 mm tulips to XT-connector baked while connected to battery (made a lot of smoke and scared Julia! :-) 
Last, I marked batteries with numbers, as it is easy to miss one which is already used. By the way, it seems that batteries were factory charged at 60%, so that after first full cycle I got ~10 minutes of flight time per battery.
Marked batteries and new direct tuplips to XT60 connector. 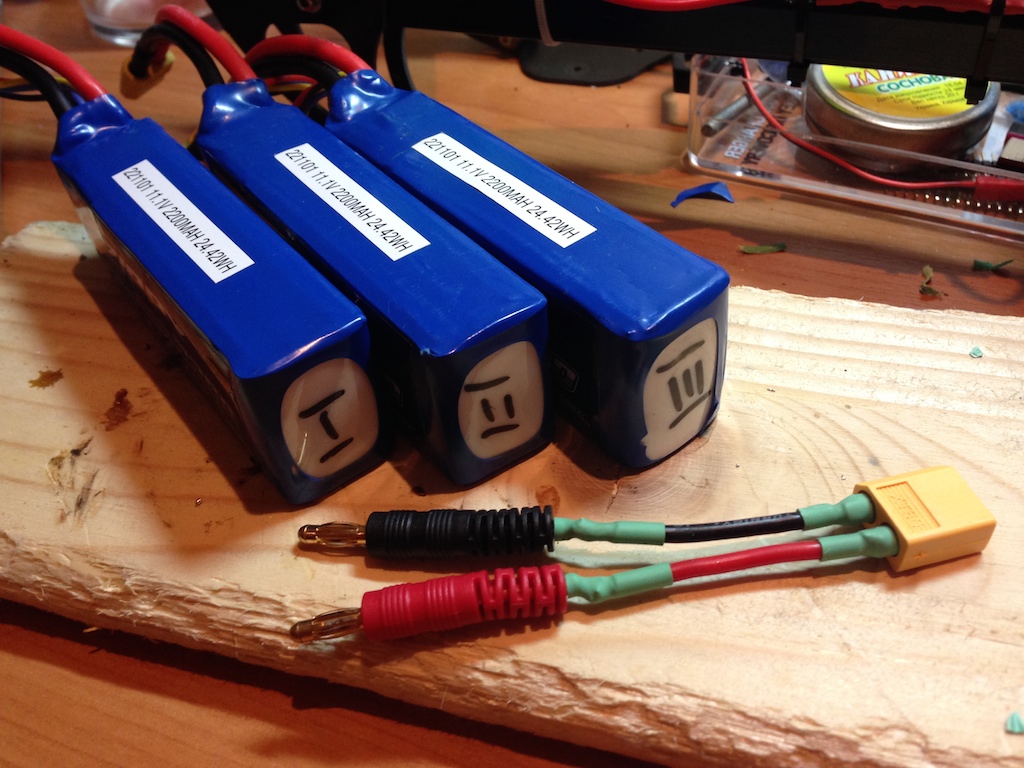
{kind=link}